

上一期《指南》,我们分享了《七步搞定研控E总线驱动器与欧姆龙PLC主站连接》,这次,我们继续完善接线后的注意事项,希望对你有所帮助!
一、环境对象
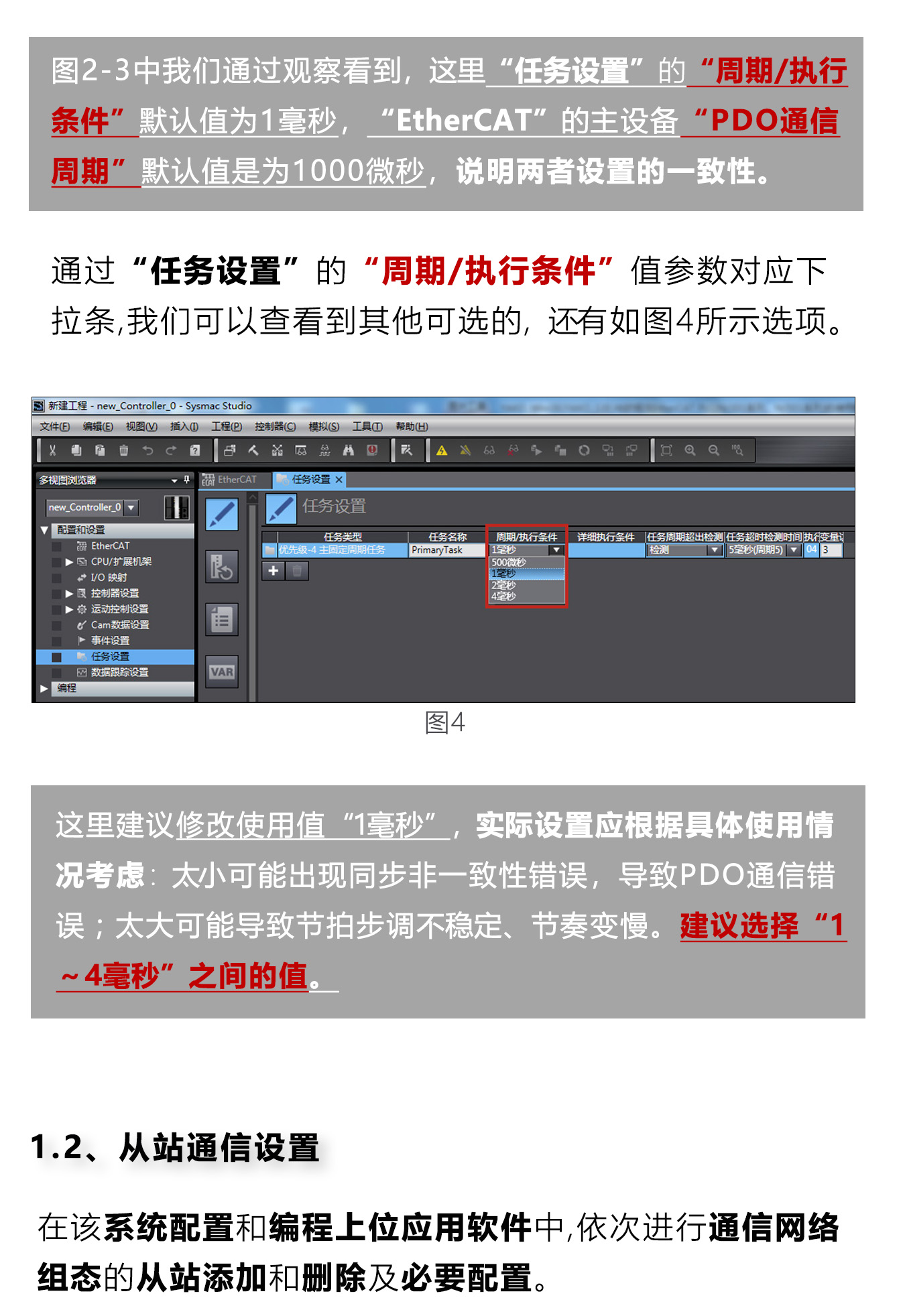
1、本手册中所涉及主站组成——欧姆龙PLC[NX1P2系列、NX102系列、NJ301系列、NJ501系列、NX701系列,EtherCAT通信耦合单元NX-ECC2系列等],其所用编程软件:SysmacStudio(编程+配置)。【注意:本手册相关部分只讲配置注意事项,不介绍编程,如需了解编程的内容请他处查阅相关资料。】2、本手册中所涉及从站组成——我司 EtherCAT总线驱动器(本文以MS-S3E驱动器为例),其所用参数设置上位软件:YAKO EtherCAT ****。
二、说明注意
本手册主要阐述和记录一些主从站搭配时的注意事项和必要设置。文中所用控制器、驱动器等器件参数数字大小,仅作参考和推荐的优选值,不可作为其他用途而生硬套搬。
软件的说明和链接下载、控制器和驱动器等器件的手册和资料请另寻收集。本手册不做其他连接设置的相关解释说明。
三、连接后使用注意事项(本次重点内容)
当驱动器与控制器之间建立并完成通信网络的硬件连接和软件组态后,我们需要对相关的通信参数和运动参数进行设置。








综合前面介绍的PDO设置在“数字输入”部分的分配对应不同方案,考虑到执行机构关于参考点的位置和传感器安装的位置关系,结合回原效率(回原速度—时长)、回原准度、回原平稳性等对“回原方式”、“回原起始方向”和“原点输入检查方向”等进行选择。
另外,需要注意在定位的运动模式下的基本参数,和其他运动涉及的速度、加/减速度、加加速度、位置、距离等运动相关的物理量的比例倍数关联性设置,以确保运动的速度和位移,有客观正确的现象和结果。


